Keep downtopc Online Please

Categories
PREMIUM ACCOUNTS
Support downtopc by buying or renewing your premium account using below links:


Most Commented


![eM Client Pro 9.2.1735 Multilingual [Updated]](https://pikky.net/medium/wXgc.png)
Partners



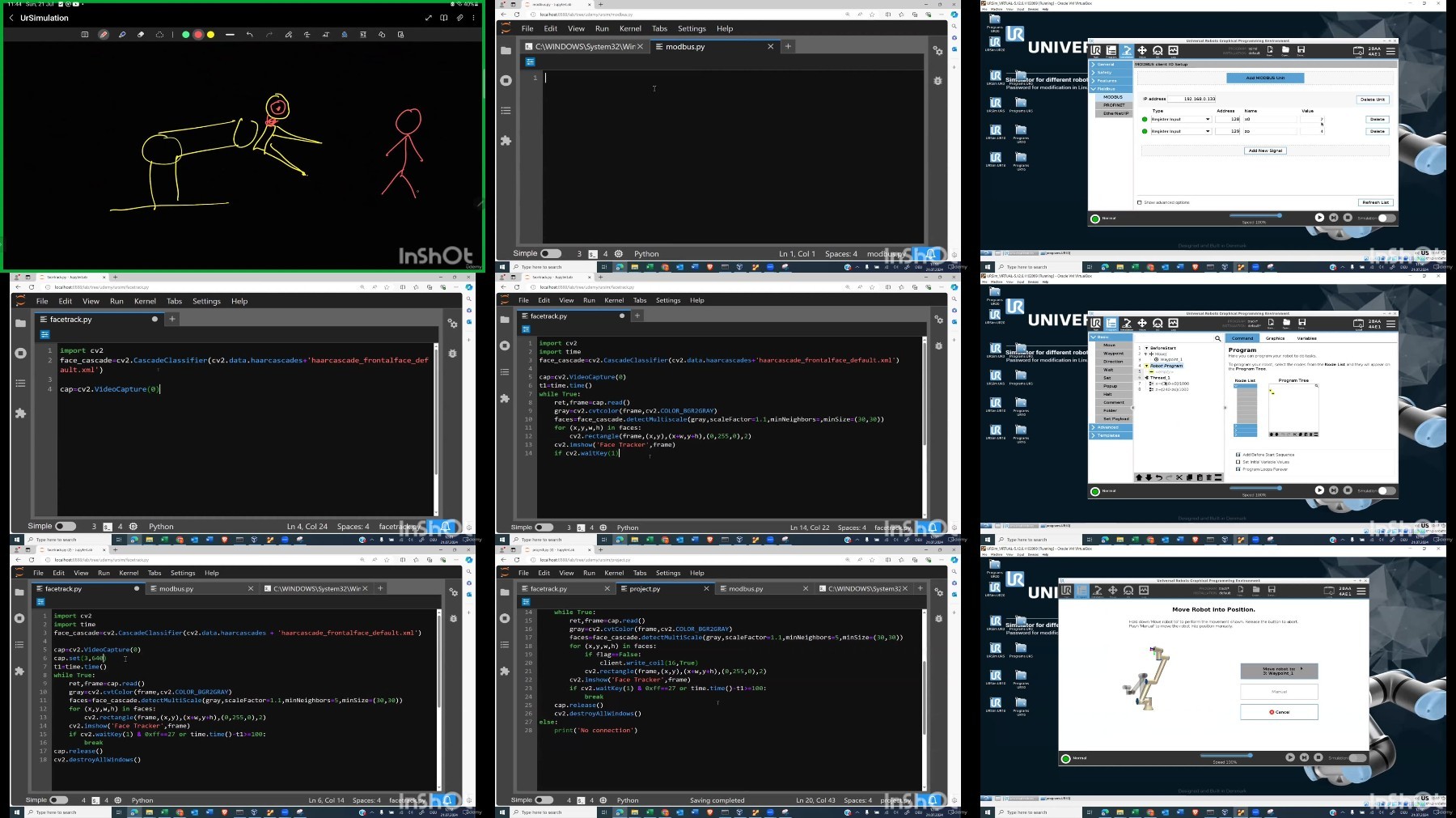
Hands On Robotics With Python: Basics To Real World Projects


Description material

Hands On Robotics With Python: Basics To Real World Projects
Published 10/2024
MP4 | Video: h264, 1920x1080 | Audio: AAC, 44.1 KHz
Language: English | Size: 4.78 GB | Duration: 7h 1m
Python, Universal robots, Robotic Arms, Communications systems, Simulation
What you'll learn
Learn Robotic Arm for beginners
Build projects based on Python
Learn by building projects on wireless communication
Be industry ready to deploy the robotic solutions for automating manufacturing
Requirements
No programming experience is required. A bit of enthusiasm is expected.
Description
This course is designed to take you from the fundamentals of robotics and Python programming to hands-on projects using real robots. You'll start by learning the essential theory and mathematics behind robotics, building a strong foundation for understanding robot movement and control.Next, we'll dive into Python programming, covering everything from the basics up to Object-Oriented Programming (OOP) concepts. Throughout the course, you'll work on exciting Python projects to solidify your coding skills.We'll then explore the basics of communication systems and their applications in robotics, accompanied by practical projects to see these concepts in action.To further enhance your learning, you'll experience simulations to test and develop your robotic systems before moving on to real-world tasks. Simulations will be done in ur-sim (A Universal Robot simulation Platform). Finally, you'll work with a real robot to complete advanced projects like pick-and-place tasks and a face-tracking system.By the end of this course, you'll have the knowledge, coding skills, and hands-on experience to confidently pursue robotics projects. This course is suitable for beginners with an interest in robotics and programming, as well as for anyone looking to expand their skills through practical, project-based learning. You'll also gain valuable problem-solving skills and technical insight that can be applied in various fields.
Overview
Section 1: Basic Concepts of Industrial Arms
Lecture 1 Course Structure and Expectations
Lecture 2 Introduction to Industrial Robots
Lecture 3 Kinematics
Lecture 4 Resources
Section 2: Python Basics
Lecture 5 Python Installation and Setting up our environment
Lecture 6 Data Types
Lecture 7 Flow Control
Lecture 8 Functions
Lecture 9 Classes
Lecture 10 Modules
Lecture 11 Python Project1
Section 3: Communication systems
Lecture 12 Data_Formats
Lecture 13 Learn by building a project on making a chat room for two users
Lecture 14 Transfer files among machines using python: project
Section 4: Simulation
Lecture 15 Installation of UR_Sim
Lecture 16 UR_SIM overview
Lecture 17 Simulated Task using UR_sim
Lecture 18 Simulate Universal Robot with Python Package 1
Lecture 19 Simulate Universal Robot with Python Package 2
Lecture 20 Simulated Face Tracking with Universal Robot: Project
Section 5: Practical with the real Robot
Lecture 21 VNC installation
Lecture 22 Overview of URSocket Package
Lecture 23 Pick and Place task with Universal Robot controlled by Python : Project 1
Lecture 24 Face Tracking with Universal Robot: Project 2
A person, who is interested in python or robotics
FileAxa
Warning! You are not allowed to view this text.
DDownload
Warning! You are not allowed to view this text.
RapidGator
Warning! You are not allowed to view this text.
FileStore
TurboBit
Warning! You are not allowed to view this text.
Join to our telegram Group
Information
Users of Guests are not allowed to comment this publication.
Users of Guests are not allowed to comment this publication.
Choose Site Language
Keep downtopc Online Please
PREMIUM ACCOUNTS
Support downtopc by buying or renewing your premium account using below links:
Recommended news


Commented
![Movavi Video Editor 24.0.2.0 Multilingual [ Updated]](https://pikky.net/medium/qhrc.png)


All files on the site are presented for informational purposes.
Copyright © 2025 - Downtopc | All rights reserved